這裡總結一下,前幾篇文章我們講了這個案子起源,以及我們有哪些資源,MLOps ROS的基礎知識,與我們的系統架構,地端與雲端的串連等。
這邊將重點再次逐一列出:
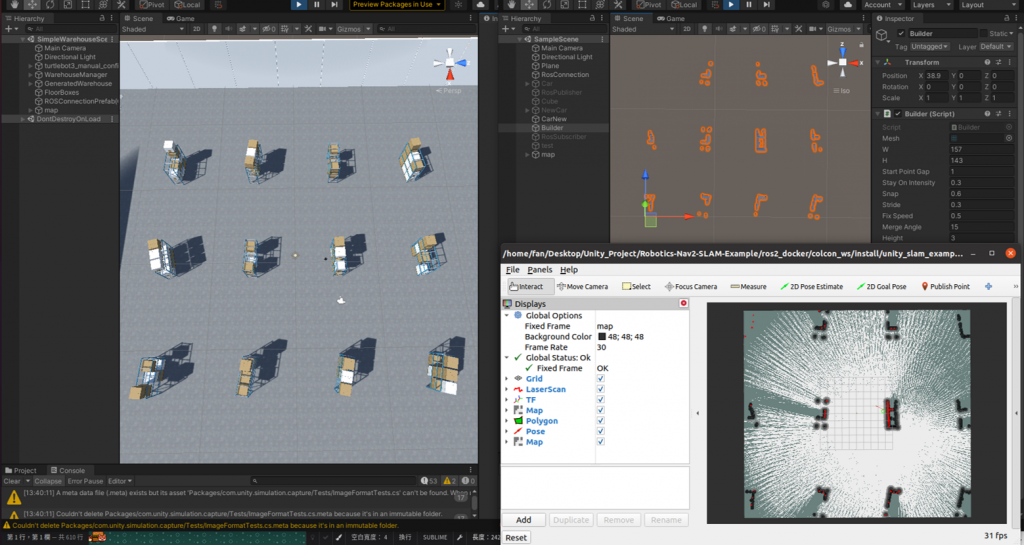
接下來我們要講虛擬環境(unity)的建置以及搭配雲端環境的ML模擬運算。
而為了讓運算能即使的反饋,雲端的機器擴展與系統串連,要以微服務(microservice)的方式佈建,這個時候Kubernetes的搭配使用就格外重要,如何透過K8S在每次服務啟動時自動加載greengrass(mqtt)憑證設定,讓雲端與地端、雲端與虛擬環境的機器,全自動佈建。
所以之後章節將"可能"包含:


 iThome鐵人賽
iThome鐵人賽